DJI Zenmuse L2 (LiDAR)
The Zenmuse L2 is a high-precision aerial LiDAR system that empowers drones with more accurate and efficient 3D data collection.
With the DJI Zenmuse L2 there are no ongoing software costs.
Upon activation you will receive two types of free DJI Terra licenses:
- LiDAR Point Cloud Processing license (perpetual license, permanently effective), which includes LiDAR Point Cloud Accuracy Optimization, LiDAR Point Cloud Smoothing, and Lidar Ground Classification
- DJI Terra Pro Full-Featured license (three months)
Zenmuse L2 integrates frame LiDAR, a self-developed high-accuracy IMU system, and a 4/3 CMOS RGB mapping camera, providing DJI flight platforms with more precise, efficient, and reliable geospatial data acquisition. When used with DJI Terra, it delivers a turnkey solution for 3D data collection and high-accuracy post-processing.
Key Features
Integrated LiDAR Solution
Supported by its powerful hardware, L2 can allow for a precise scan of complex subjects within an extended range and faster point cloud acquisition. During operations, users can preview, playback, and process point cloud models on-site, with Task Quality Reports generated by DJI Terra, offering a simple, one-stop solution to improve overall efficiency. This enables users to achieve high-precision point cloud results with one-stop post-processing.
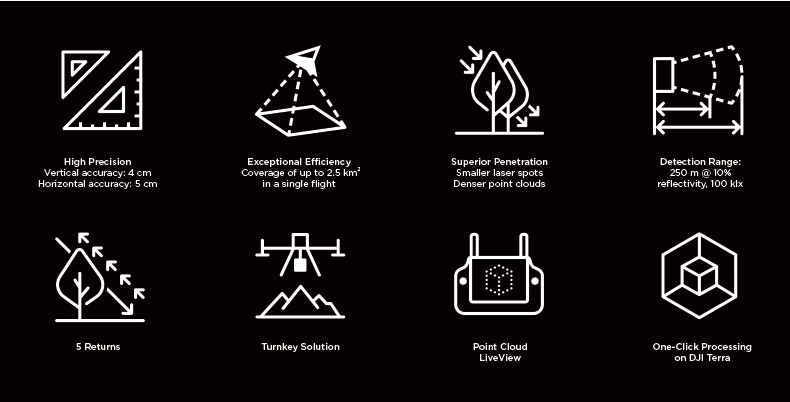
High-Level Precision: By combining GNSS and a high-accuracy self-developed IMU, this solution achieves 4cm vertical accuracy and 5cm horizontal accuracy. [1]
Exceptional Efficiency : It’s ready for work as soon as it’s powered on and can collect both geospatial and RGB data from a 2.5km2 area in a single flight. [2]
Intuitive Operation: In conjunction with Matrice 350 RTK and DJI Terra, L2 offers a turnkey solution that is simple to use, lowering the operational threshold.

Frame-Based LiDAR

30% Detection Range Increase [5]: L2 can detect from 250 metres at 10% reflectivity and 100 klx, [3] and up to 450 metres at 50% reflectivity and 0 klx. [3] The typical operational altitude now extends up to 120 metres, notably enhancing operational safety and efficiency.

Smaller Laser Spots, Denser Point Clouds: With a reduced spot size of 4×12 cm @100m, only a fifth of that of L1, L2 not only detects smaller objects with more details, but can also penetrate denser vegetation, generating more accurate digital elevation models (DEM).

Supports 5 Returns: In densely vegetated areas, L2 can capture more ground points beneath the foliage.

Effective Point Cloud Rate: 240,000 pts/s: In both single and multiple return modes, L2 can reach a max point cloud emission rate of 240,000 points per second, allowing the acquisition of more point cloud data in a given time frame.
Two Scanning Modes: L2 supports two scanning modes, offering flexibility for users based on their task demands. In repetitive scanning mode, L2's LiDAR can achieve more uniform and accurate point clouds while meeting high-precision mapping requirements. In non-repetitive scanning mode, it offers deeper penetration for more structural information, making it suitable for power line inspection, forestry surveying, and other scenarios.

Frame-based Design: The frame-based design results in an effective point cloud data rate of up to 100%. Together with a three-axis gimbal, it brings more possibilities to surveying scenarios.
High-Accuracy IMU System
Improved Accuracy: The high-accuracy self-developed IMU system, combined with the drone’s RTK positioning system for data fusion during post-processing, gives L2 access to highly accurate absolute position, speed, and attitude information. In addition, the IMU system’s enhanced environmental adaptability improves the operational reliability and precision of L2.
Yaw Accuracy [6] Real-time: 0.2°, post-processing: 0.05°
Pitch/Roll Accuracy [6] Real-time 0.05°, post-processing 0.025°

No IMU Warm-up: The performance of the IMU system has been significantly enhanced, and it is ready for use the moment it's powered on. And, the accompanying drone is ready to begin tasks immediately once the RTK is in FIX status, delivering an optimized in-the-field experience.
RGB Mapping Camera

4/3 CMOS, Mechanical Shutter: Pixel size has been enlarged to 3.3 μm, and effective pixels now reach 20 MP, resulting in a significant improvement in overall imaging, as well as more enriched true-color point cloud details. The minimum photo interval has been reduced to 0.7 seconds. The mapping camera has a shutter count of up to 200,000 times, further reducing operational costs. When point cloud collection is not needed, the RGB camera can still take photos and videos, or collect images for visible light mapping.
Enhanced Operational Experience
Diverse Flight Route Types: Supports Waypoint, Area, and Linear Route types, for handling surveying tasks in a variety of environments.
Point Cloud LiveView: During operation, DJI Pilot 2 supports three display modes - RGB, point cloud, and point cloud/RGB side-by-side display, presenting operational results in an intuitive way. Activating RNG (Laser Rangefinder) enables access to the distance information between the LiDAR module and the object in the center of the FOV, enhancing flight safety. It also supports four real-time point cloud coloring modes - Reflectivity, Height, Distance, and RGB.
Point Cloud Model Playback and Merging: After the operation, the 3D point cloud model [7] can be viewed directly in the album. 3D Point cloud models of multiple flights can also be merged, enabling on-site decision-making regarding operational quality.
Auto-Generated Task Quality Report: After point cloud data collection, the DJI Pilot 2 app will automatically generate a Task Quality Report [8] so that operators can check operational results in real-time and on-site, making fieldwork more responsive and worry-free.
PPK Solution: In complex operational environments, users can set up RTK base stations before the operation to preemptively avoid the loss of RTK data due to interference, video transmission disconnection, or other issues. After the operation, import original files into DJI Terra to use the PPK (post-processing kinematic) process to rebuild high-precision models.
One-Click Processing on DJI Terra: Achieve efficient and reliable one-stop post-processing when importing point cloud data into DJI Terra. Generate a standard-format 3D point cloud model with just a click after point cloud trajectory calculation and accuracy optimization. Upon ground point classification, using Ground Point Type, a DEM can be output. Point cloud quality can be analyzed with the Accuracy Control and Check function.
Application Scenarios
In coordination with DJI Enterprise flight platforms and DJI Terra, Zenmuse L2 can be applied to land surveying and mapping, electricity, forestry, and infrastructure management, as well as other scenarios.

Please contact us for more information or for a quote.
Notes:
1. Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered on. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). Using repetitive scanning with the RTK in FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m. The field contained objects with obvious angular features, and used exposed hard ground checkpoints that conformed to the diffuse reflection model. DJI Terra was used for post-processing with Optimize Point Cloud Accuracy enabled. Under the same conditions with Optimize Point Cloud Accuracy not enabled, the vertical accuracy is 4 cm and the horizontal accuracy is 8 cm.
2. Measured with Zenmuse L2 mounted on Matrice 350 RTK with a flight speed of 15 m/s, flight altitude of 150 m, side overlap rate of 20%, Calibrate IMU enabled, Elevation Optimization turned off, and terrain follow turned off.
3. The data presented are typical values. Measured using a flat subject with a size larger than the laser beam diameter, a perpendicular angle of incidence, and an atmospheric visibility of 23 km. In low-light environments, the laser beams can achieve the optimal detection range. If a laser beam hits more than one subject, the total laser transmitter power is split and the achievable range is reduced. The maximum detection range is 500 m.
4. After power is turned on, the IMU doesn't require warm-up; however, users must wait for the drone RTK to be in the FIX status before it can fly and work.
5. Calculated by comparing with Zenmuse L1.
6. Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m.
7. 3D models are processed by sparse representation.
8. Only supports the generation of Waypoint, Area, and Linear Task Quality Reports.
Product Specifications
General
Product Name: Zenmuse L2
Dimensions: 155×128×176 mm (L×W×H)
Weight: 905±5 g
Power: 28 W (typical); 58 W (max.)
IP Rating: IP54
Supported Aircraft: Matrice 300 RTK (requires DJI RC Plus); Matrice 350 RTK
Storage Temperature: -20° to 60° C (-4° to 140° F)
System Performance
Detection Range: 450m @50% reflectivity, 0 klx; 250m @10% reflectivity, 100 klx
Typical data. Measured using a flat subject with a size larger than the laser beam diameter, perpendicular angle of incidence, and an atmospheric visibility of 23 km. In low-light environments, the laser beams can achieve the optimal detection range. If a laser beam hits more than one subject, the total laser transmitter power is split, and the achievable range is reduced. The maximum detection range is 500 m.
Point Cloud Rate: Single return: max. 240,000 pts/s; Multiple returns: max. 1,200,000 pts/s
System Accuracy: Horizontal: 5 cm @ 150 m; Vertical: 4 cm @ 150 m
Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). Using repetitive scanning with the RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m. The field contained objects with obvious angular features, and used exposed hard ground check points that conformed to the diffuse reflection model. DJI Terra was used for post-processing with Optimise Point Cloud Accuracy enabled. Under the same conditions with Optimise Point Cloud Accuracy not enabled, the vertical accuracy is 4 cm and the horizontal accuracy is 8 cm.
Real-Time Point Cloud Colouring Coding: Reflectivity, Height, Distance, RGB
LiDAR
Ranging Accuracy (RMS 1σ): 2 cm @ 150 m
Measured in an environment of 25° C (77° F) with a subject of 80% reflectivity at a distance of 150 m. The actual environment may differ from the testing environment. The figure listed is for reference only.
Maximum Returns Supported: 5
Scanning Modes: Non-repetitive scanning pattern, Repetitive scanning pattern
FOV: Repetitive scanning pattern: Horizontal 70°, Vertical 3°; Non-repetitive scanning pattern: Horizontal 70°, Vertical 75°
Minimum Detection Range: 3 m
Laser Beam Divergence: Horizontal 0.2 mrad, Vertical 0.6 mrad
Measured at full width at half maximum (FWHM) conditions. 0.6 mrad signifies that for every 100m increase in distance, the diameter of the laser beam expands by 6 cm.
Laser Wavelength: 905 nm
Laser Spot Size: Horizontal 4 cm, vertical 12 cm @ 100 m (FWHM)
Laser Pulse Emission Frequency: 240 kHz
Laser Safety: Class 1 (IEC 60825-1:2014)
Accessible Emission Limit (AEL): 233.59 nJ
Reference Aperture: Effective Aperture: 23.85 mm (equivalent to circular)
Max Laser Pulse Emission Power Within 5 Nanoseconds: 46.718 W
Inertial Navigation System
IMU Update Frequency: 200 Hz
Accelerometer Range: ±6 g
Angular Velocity Meter Range: ±300 dps
Yaw Accuracy (RMS 1σ): Real-time: 0.2°, Post-processing: 0.05°
Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m.
Pitch/Roll Accuracy (RMS 1σ): Real-time: 0.05°, Post-processing: 0.025°
Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m.
Horizontal Positioning Accuracy: RTK FIX: 1 cm + 1 ppm
Vertical Positioning Accuracy: RTK FIX: 1.5 cm + 1 ppm
RGB Mapping Camera
Sensor: 4/3 CMOS, Effective Pixels: 20 MP
Lens: FOV: 84°; Format Equivalent: 24 mm; Aperture: f/2.8-f/11;Focus Points: 1 m to ∞ (with autofocus)
Shutter Speed: Mechanical Shutter: 2-1/2000 s; Electronic Shutter: 2-1/8000 s
Shutter Count: 200000
Photo Size: 5280×3956 (4:3)
Still Photography Modes: Single shot: 20 MP; Timed: 20 MP; JPEG Timed Interval: 0.7/1/2/3/5/7/10/15/20/30/60 s; RAW/JPEG + RAW Timed Interval: 2/3/5/7/10/15/20/30/60 s
Video Codec and Resolution: H.264; 4K: 3840×2160@30fps; FHD: 1920×1080 @30fps
ISO: Video: 100-6400; Photo: 100-6400
Video Bitrate: 4K: 85Mbps; FHD: 30 Mbps
Supported File System: exFAT
Photo Format: JPEG/DNG (RAW)
Video Format: MP4 (MPEG-4 AVC/H.264)
Gimbal
Stabilisation System: 3-axis (tilt, roll, pan)
Angular Vibration Range: 0.01°
Mounting: Detachable DJI SKYPORT
Mechanical Range: Tilt: -143° to +43°; Pan: ±105°
* Structural limit, not controllable range.
Controllable Range: Tilt: -120° to +30°; Pan: ±90°
Operation Mode: Follow/Free/Re-centre
Data Storage
Raw Data Storage: Photo/IMU/Point cloud/GNSS/Calibration files
Point Cloud Data Storage: Real-time modeling data storage
Supported microSD Cards: microSD: Sequential writing speed 50 MB/s or above and UHS-I Speed Grade 3 rating or above; Max capacity: 256 GB. Use the recommended microSD cards.
Recommended microSD Cards: Lexar 1066x 64GB U3 A2 V30 microSDXC; Lexar 1066x 128GB U3 A2 V30 microSDXC; Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC; Lexar 1066x 256GB U3 A2 V30 microSDXC
Post-Processing
Supported Software: DJI Terra
Data Format: DJI Terra supports exporting point cloud models in the following formats: PNTS/LAS/PLY/PCD/S3MB
In the box
Zenmuse L2 × 1
Storage Case × 1
Lens Cap × 1
Storage Case × 1
Lens Cleaning Cloth × 1
WHY BUY FROM US?
By buying from Ferntech, you'll have the confidence that you are dealing directly with New Zealand's leading drone experts. Our staff are knowledgable drone pilots who offer expert advice, trusted support and superior specialist service. Only through us will you receive a full New Zealand warranty, phone and email support, and access to our certified Repairs Centre with DJI-qualified drone technicians. And we guarantee that we will have the best prices on the market — if not let us know and we will match any price (conditions apply).
Warranty Details
System Performance
What is the protection level of the Zenmuse L2?
Zenmuse L2 achieves an IP54 rating according to the IEC60529 standard under controlled laboratory conditions. To ensure the highest levels of protection:
• Before installing, make sure that the interface and surface of the gimbal are dry;
• Before use, make sure that the gimbal is firmly installed on the drone and the SD card protective cap is clean, free of foreign objects, and closed;
• Before opening the SD card protective cap, wipe the surface of the drone clean.
The protection level will decrease over time due to normal device use and wear.
What aircraft is Zenmuse L2 compatible with? Which gimbal interface can it be mounted on?
Zenmuse L2 is compatible with the Matrice 350 RTK and Matrice 300 RTK and only supports DJI RC Plus as the remote controller. Before using, please upgrade the firmware of the aircraft and remote controller to the latest version. To ensure mapping accuracy, make sure the L2 is mounted on a single downward gimbal connector with the cable connected to the right USB-C port (when facing the aircraft).
What is the Field of View (FOV) of Zenmuse L2's LiDAR?
Repetitive scanning: Horizontal 70°, Vertical 3°
Non-repetitive scanning: Horizontal 70°, Vertical 75°
What is the maximum detection range of Zenmuse L2?
Detection range:
250m @10% reflectivity, 100 klx
450m @50% reflectivity, 0 klx
The recommended operating altitude is 30-150 m.
How many returns does Zenmuse L2 support?
Zenmuse L2 supports five types of returns: Single return (strongest echo), dual returns, triple returns, quad returns, and penta returns.
What is the point cloud rate of Zenmuse L2?
Single return: max. 240,000 pts/s
Multiple returns: max. 1,200,000 pts/s
How many scanning modes does Zenmuse L2 have? In what scenarios do they apply?
Zenmuse L2 has two scanning modes: non-repetitive scanning mode and repetitive scanning mode
In repetitive scanning mode, LiDAR can achieve more uniform and accurate scanning, meeting high-precision mapping requirements.
In non-repetitive scanning mode, it offers stronger penetration, gathering more structural information, making it suitable for power line inspection, forestry surveying, and other scenarios.
What is the IMU accuracy of Zenmuse L2?
Yaw Accuracy: Real-time: 0.2°, Post-processing: 0.05°
Pitch/Roll Accuracy: Real-time 0.05°, Post-processing 0.025°
Horizontal Positioning Accuracy: 1 cm + 1 ppm (RTK FIX)
Vertical Positioning Accuracy: 1.5 cm+1 ppm (RTK FIX)
The yaw and pitch/roll accuracies were measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m.
What is L2's RGB camera used for?
When collecting point cloud data, the RGB camera can provide real-time color information for the data, and the photos taken can be used for reconstructing 2D RGB models. When there is no need to gather point cloud data, the RGB camera can take photos and videos, and collect images for reconstructing 2D or 3D RGB models.
What is the surveying and mapping accuracy of Zenmuse L2?
Horizontal accuracy: 5 cm
Vertical accuracy: 4 cm
Measured under the following conditions in a DJI laboratory environment: Zenmuse L2 mounted on a Matrice 350 RTK and powered up. Using DJI Pilot 2’s Area Route to plan the flight route (with Calibrate IMU enabled). Using repetitive scanning with the RTK in the FIX status. The relative altitude was set to 150 m, flight speed to 15 m/s, gimbal pitch to -90°, and each straight segment of the flight route was less than 1500 m. The field contained objects with obvious angular features, and used exposed hard ground check points that conformed to the diffuse reflection model. DJI Terra was used for post-processing with Optimize Point Cloud Accuracy enabled. Under the same conditions with Optimize Point Cloud Accuracy not enabled, the vertical accuracy is 4 cm and the horizontal accuracy is 8 cm.
What CMOS size is Zenmuse L2’s RGB camera? And what is its pixel size?
The RGB camera uses a 4/3 CMOS, and the pixel size is 3.3 × 3.3 μm.
What improvements does Zenmuse L2 have compared to the previous generation?
The performance of the LiDAR has improved to about 1/5 of L1’s spot size when the object or area is 100 m from the LiDAR. The LiDAR's penetration ability has been significantly increased, and both its detection range and accuracy have improved. The pixel size of the RGB camera has increased by 89% compared to L1's 2.4 × 2.4μm. The accuracy of the IMU has improved to 0.05° (real-time) and 0.025° (post-processing). The LiDAR supports Laser Rangefinder (RNG).
Field Data Collection
How efficient is the surveying and mapping operation of Zenmuse L2?
Zenmuse L2 can collect data covering an area of up to 2.5 km2 in a single flight.
Measured when Zenmuse L2 is mounted on Matrice 350 RTK with a flight speed of 15 m/s, flight altitude of 150 m, side overlap rate of 20%, Calibrate IMU enabled, Elevation Optimization turned off, and terrain follow turned off.
What are the application scenarios of Zenmuse L2?
Zenmuse L2 can be widely used in multiple scenarios including topographic surveying and mapping, power line modeling, forestry management, surveying measurement, and more.
What type of SD card is required for Zenmuse L2?
An SD card with a sequential writing speed of 50 MB/s or above and UHS-I Speed Grade 3 rating or above; Max capacity: 256 GB.
Lexar 1066x 64GB U3 A2 V30 microSDXC
Lexar 1066x 128GB U3 A2 V30 microSDXC
Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC
Lexar 1066x 256GB U3 A2 V30 microSDXC
What does real-time point cloud modeling of Zenmuse L2 mean? Which coloring modes are supported? What operations are supported during viewing?
During the collection of original point cloud data, Zenmuse L2 can generate and display a real-time point cloud model in the DJI Pilot 2 app processed with sparse resolution. Four coloring modes are supported, including reflectivity, height, distance and RGB. When viewing models in the album on the remote controller, you can rotate, drag, zoom, quickly switch the perspective, and re-centre the view.
Which types of flight tasks does Zenmuse L2 support?
The L2 currently supports Waypoint Route, Area Route and Linear Route flight tasks.
Does Zenmuse L2 require warm-up before performing flight tasks?
No warm-up is required. Once the aircraft’s RTK is in the FIX status, it can take off and operate.
Does Zenmuse L2 need to calibrate the IMU during operation?
To ensure the accuracy of the collected data, Calibrate IMU needs to be enabled. Before executing the flight task, please enable Calibrate IMU. Before manual flight, you can tap Calibrate before the operation to manually trigger the calibration. During the operation, manually trigger the IMU calibration again based on the countdown prompt.
What is the purpose of Zenmuse L2’s task quality report?
The Task Quality Report records the effective data duration of the LiDAR, the camera, and the IMU module. Operators can judge the validity of data collection based on the status of each module.
What are the different types of data saved on the SD card of Zenmuse L2?
CLC (camera LiDAR calibration file)
CLI (LiDAR IMU calibration file)
LDR (LiDAR data)
RTK (RTK data of main antenna)
RTL (compensation data of RTK pole)
RTS (RTK data of auxiliary antenna)
RTB (base station RTCM data)
IMU (IMU raw data)
SIG (PPK signature file)
LDRT (point cloud file for playback on the app)
RPT (point cloud quality report)
RPOS (real-time POS solution data)
JPG (photos taken during flight)
Will there be a difference in accuracy when Zenmuse L2 is mounted on Matrice 300 RTK and Matrice 350 RTK?
In the FIX state of RTK, there is no difference in accuracy between the two.
During the operation, can operators playback the point cloud results?
Yes. Operators can view the current point cloud collection on the real-time point cloud display, and also quickly preview the recorded point cloud 3D model. After the operation is completed, you can download and view the point cloud 3D model in the library, and also perform operations such as merging 3D point cloud models of multiple flights.
Operations like model playback and merging need to be performed when the aircraft and Zenmuse L2 are connected.
Is the real-time liveview and playback of the 3D point cloud model a 1:1 match with the model rebuilt in post-processing?
It is not a 1:1 match. Both the liveview and the playback of the 3D point cloud models are processed with sparse representation. In terms of the number of point clouds and accuracy, it is different from the model rebuilt in DJI Terra.
Post-processing
How to build a high-precision model with data collected by Zenmuse L2?
Launch DJI Terra to create a new "LiDAR Point Cloud" task. Follow the instructions to import the data from the SD card into DJI Terra and complete the related settings, and you can initiate high-precision modeling.
In DJI Terra, what result formats can be generated with the data of Zenmuse L2?
Point cloud formats: PNTS, LAS, PLY, PCD, S3MB
Trajectory formats: sbet.out, sbet.txt
What new point cloud processing functions can be achieved by Zenmuse L2 with DJI Terra?
1. Ground point classification;
2. Output digital elevation model (DEM);
3. A new Accuracy Control and Check function that supports local coordinate system, to ensure the results reach surveying and mapping accuracy;
4. Optimisation of the point cloud thickness between the flight strips, making it thinner and more consistent;
5. More comprehensive point cloud quality report.
How to understand the reflectivity value in DJI Terra?
The reflectivity range is from 0 to 255, with 0 to 150 corresponding to 0 to 100% reflectivity under Lambertian diffuse reflectance, and 151 to 255 corresponding to full reflectance.
The reflectance value is related to multiple factors such as the surface topography of the geographical object, lighting conditions, and the incident angle, and cannot form a strict correspondence with the absolute reflectance.
There's currently no reviews for this product, be the first to write one.
Related Products

Contact for Pricing

$2,199.00

$10,429.00